

Revista Canal Abierto 45 | Artículo Científico
Sistema de navegación dinámica asistida por computadora como auxiliar en el abordaje de canales de difícil acceso endodóntico.
Aceptado: 15-01-2022
Páginas 12-18
María Susana Contardo 1,2 Alicia Marianela Arias A. 1 Ramiro J. Castro B 1,2
1 Programa de Especialización en Endodoncia, Facultad de Ciencias de la Salud, Universidad de Talca, Chile.
2 Docente Departamento de Rehabilitación Bucomaxilofacial, Universidad de Talca, Chile.
Resumen
En la actualidad, existe una tendencia creciente a utilizar métodos quirúrgicos y terapéuticos navegados asistidos por computadora en la práctica clínica diaria. Estas técnicas fueron inicialmente introducidas, por primera vez a la Odontología, en el área de los implantes dentales. Estas técnicas derivaron a otras áreas de la odontología, en particular a la endodoncia. Sus usos potenciales incluyen procedimientos como la creación de acceso endodóntico y la localización del canal radicular. Así también, y gracias sus novedosos beneficios, han sido utilizadas en casos de reintervención endodóntica, reimplante intencional y microcirugía.
Tanto la navegación estática como la dinámica han demostrado potenciales beneficios y significativas diferencias, dirigidos a facilitar las maniobras quirúrgicas y la reducción del riesgo de daño iatrogé- nico, comparado con la técnica convencional.
Este articulo, describe, detalla y revisa la literatura con relación a los sistemas de navegación quirúrgica asistida por computadora como auxiliar en el abordaje de canales de difícil acceso endodóntico.
Palabras claves: Endodoncia Guiada. Navegación. Dinámica.
Abstract
Currently, there is a growing tendency to use computerassisted navigated surgical and therapeutic methods in daily clinical practice. These techniques were initially introduced, for the first time in dentistry, in the field of dental implants. These techniques have since spread to other areas of dentistry, in particular endodontics. Potential uses include procedures such as endodontic access creation and root canal localization. They have also been used in cases of endodontic reintervention, intentional reimplantation and microsurgery due to their significant benefits.
Both static and dynamic navigation have demonstrated potential benefits and significant differences aimed at facilitating surgical maneuvers and reducing the risk of iatrogenic damage compared to the conventional technique.
This article describes, details and reviews the literature regarding computerassisted surgical navigation systems as an aid in the approach to difficult-to-access endodontic canals.
Keyword: Guided endodontics. Dynamic navigation.
Introdución
El adecuado diseño y preparación de la cavidad de acceso ideal es uno de los aspectos más críticos y desafiantes de la terapia del canal radicular. En todos los casos, la calidad de la preparación del acceso sienta las bases para cada etapa del tratamiento endodóntico, ya que es el portal a través del cual deben pasar todos los instrumentos, materiales y soluciones de irrigación (1). Este acceso tiene como objetivo, identificar la entrada de los canales para la posterior limpieza y conformación, desinfección y obturación tridimensional del sistema de canales radiculares. Cada uno de estos pasos son esenciales para un tratamiento endodóntico exitoso (2).
En ocasiones, un adecuado acceso podría ser complicado de lograr debido a la presencia de calcificaciones pulpares fisiológicas o patológicas en la cámara (3).
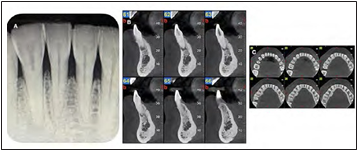
Figura 1:
A) Radiografía periapical de diente 4.2 se observa obliteración parcial del canal radicular.
B) Corte sagital de TCHC que muestra cámara pulpar permeable y canal radicular obliterado en tercios medio y apical
C) Corte axial de TCHC donde se observa un canal acintado en sentido B-L en tercio cervical y medio.
La obliteración del canal pulpar (OCP) se caracteriza por el depósito de tejido duro dentro del espacio del canal radicular y una decoloración amarilla de la corona clínica también llamada metamorfosis calcificada (CM), la OCP es una secuela de un traumatismo dental y se desarrolla con mayor frecuencia en los dientes después de lesiones por concusión y subluxación (4). La obliteración pulpar después de una lesión por concusión ocurre en el 3% de los dientes con raíces inmaduras y en el 7% de los dientes con raíces completamente formadas. En el caso de la subluxación, la OCP se produce en el 11% de los dientes con raíces inmaduras y en el 8% de los dientes con raíces completamente formadas (5). En estos casos, la necrosis pulpar ocurre con más frecuencia en dientes con formación radicular completa (Andreasen et al. 1985), y la obliteración pulpar es más frecuente en dientes que tienen raíces inmaduras en el momento de la lesión (6).
Adicionalmente, estas calcificaciones también pueden ser un hallazgo frecuente en dientes con restauraciones coronales extensas y de larga data (7), en respuesta a lesiones pulpares por caries dental (8) o incluso en anormalidades anatómicas como Dens Invaginatus (9).
aOCP es considerada por laAsociaciónAmericana de Endodoncia una condición de alta complejidad, igualmente que los casos con restauraciones que ya no reflejan la anatomía original del diente, anormalidades anatómicas coronales y/o radiculares y accesos previos con complicaciones (10).
La localización y negociación de canales radiculares calcificados suele ser posible cuando el tratamiento se realiza bajo un microscopio quirúrgico por un especialista (11). A pesar de la información proporcionada por la tomografía computarizada de haz cónico (TCHC) (12) y el uso de alta magnificación y ultrasonido (13), la preparación del acceso esta propensa a errores de procedimiento que pueden conducir a una pérdida sustancial de la estructura de la dentina, lo que reduce el pronóstico a largo plazo y una mayor probabilidad de fracaso durante el tratamiento (8) incluso para el profesio- nal más experimentado.
La endodocia mínimamente invasiva preconiza la máxima preservación de la estructura dental coronal, cervical y radicular sana durante el procedimiento endodóntico. Esta área que corresponde aproximadamente a 4 mm coronal al hueso alveolar y 4 mm hacia apical del mismo, es crucial para transferir la carga de la mesa oclusal a la raíz y gran parte de ella es insustituible (14; 15).
En la última década la incorporación a la práctica endodóntica de la navegación quirúrgica asistida por computadora o endodoncia guiada, ha permitido lograr importantes avances en la obtención de accesos más conservadores y en menor tiempo operatorio (16). Tanto la modalidad estática (NE) como la dinámica (ND), reducen significativamente los errores de procedimiento en comparación con la técnica a mano alzada (17,18,19), evitando el retiro excesivo de tejido, el debilitamiento y la eventual perforación de la raíz.
La guía estática requiere el uso de un stent quirúrgico fijo, basado en una exploración preoperatoria de la TCHC, y se obtiene por medio de un diseño asistido por computadora / producción asistida por computadora (CAD / CAM) para guiar una fresa a un sitio previamente planificado para la localización y exploración de canales radiculares (20). Fue introducida en odontología como guía quirúrgica para colocar implantes, disminuyendo el tiempo quirúrgico y consiguiendo un postoperatorio con menos dolor y menor respuesta inflamatoria (21). Recientes reportes clínicos y estudios in vitro han propuesto el uso de este sistema de plantillas 3D para aumentar la precisión en las preparaciones de cavidades quirúrgicas y no quirúrgicas en Endodoncia (22,23). En un estudio in vitro se compararon cavidades de acceso endodóntico en dientes con canales radiculares calcificados preparados con la técnica convencional y con endodoncia guiada. Los resultados demostraron que la pérdida media de tejido dentario con la técnica convencional fue de 49,9 mm3 y para el abordaje guiado fue de 9,8 mm3. La duración media del tratamiento fue de 21,8 minutos para la técnica convencional y de 11,3 minutos para la endodoncia guiada. Utilizando la técnica convencional, se accedió a 10 de 24 canales radiculares (41,7%) y a 22 de 24 mediante endodoncia guiada (91,7%) (24).
Existen reportes de casos que demuestran que el abordaje endodóntico guiado parece ser un método seguro y clínicamente factible para localizar los canales radiculares y prevenir la perforación radicular en dientes con OCP (25,26).
Los pasos básicos para la confección de una guía estática son (27).
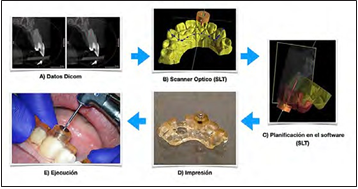
Figura 2: Flujo digital de trabajo para la confección de una guía estática para endodoncia: A) Obtención de imagen TCHC e importe de datos DICOM a software B) Escaneo óptico del diente y tejidos adyacentes. C) Match de datos DICOM de
la tomografía y STL del scan óptico para planificación en el
software D) Guía impresa E) Guía en posición.
• Obtención de una TCHC con un campo de visión (FOV) limitado y alta resolución (voxel pequeño).
• Escaneo intraoral del diente y de los tejidos blandos. Este puede ser realizado en el sillón o sobre un modelo.
• Importar datos Dicom de la TCHC y los datos STL del escan óptico a un software de planificación y diseño.
• Diseños de la guía en el software. Sobre el match se debe colocar un implante o fresa virtual alineándolo a lo largo del eje del canal y en la posición más recta, manteniendo la centralidad dentro de la raíz y alcanzando el punto de destino, el que corresponde a la primera parte visible del espacio del canal radicular.
• Luego que se ha determinado el punto de objetivo, el ángulo y el diámetro de la fresa, se agrega una funda virtual al match, cuyo diámetro debe es- tar en sintonía con el diámetro de la fresa. Generalmente, el diámetro de la fresa es de 1mm y el diámetro de la funda 0,1mm más grande que la fresa.
• Existen otros parámetros a considerar en el diseño de la guía. El espesor, que tiene relación con su adaptación y estabilidad debe tener una cobertura suficiente para evitar el movimiento del sten que puede generar una guía de perforación desviada o inexacta. Debe tener ventanas para disipar el calor durante la perforación y permitir la refrigeración.
• Una vez terminada la guía en el software, el archivo puede ser exportado a la impresora 3D.
Una técnica de acceso guiado fijo bien planificada en endodoncia optimiza el tiempo necesario para realizar el acceso, una mayor precisión en comparación a la mano alzada (24), permite el acceso a canales obliterados (20) y el acceso a través de restauraciones y postes de fibra. Además, puede eliminar la necesidad del microscopio quirúrgico y puede ser realizado por personas con menos experiencia operatoria (22,23). Son ideales para tratar dientes anteriores (25) debido a que necesita espacio suficiente para que la guía pueda adaptarse y ajustarse de manera óptima (28). Sin embargo, se ha descrito que su uso dificulta el acceso endodóntico guiado en molares (29). Se debe tener en cuenta también que en los pacientes con apertura bucal limitada puede estar contraindicada esta técnica (25). Frente a cambios en la superficie del diente, no habrá ajuste; requiere tiempo de escaneo oral, de planificación, el servicio de impresión y tiempo clínico mayor que implica un costo adicional. Si en la sesión clínica no ajustó, no permite cambios y debe descartarse.
La navegación dinámica (ND) fue introducida a la odontología para optimizar la precisión de la colocación de implantes dentales (30,31). Varios estudios han probado y evaluado su alta precisión en este tipo de procedimientos (32-35). Luego de alcanzar éxito en esta área, esta técnica comenzó a ser utilizada en la endodoncia para tratamiento quirúrgico y no quirúrgico. Dicha tecnología tiene el potencial de aplicarse en la preparación de la cavidad de acceso conservador sin las limitaciones de la endodoncia estática guiada (19).
La cirugía de navegación dinámica es la colocación de una fresa o un implante, utilizando un sistema de navegación por computadora en tiempo real, basado en los datos generados a partir de laTCHC. Localiza o determina una posición en el espacio en el contexto de su entorno y guía al clínico como un GPS guía a los conductores. El cirujano planifica dónde debe colocar el implante o la fresa en la imagen, mientras el aparato, con un sistema de cámaras ópticas de seguimiento de movimiento que rastrea dinámicamente la fresa y la mandíbula del paciente, proporciona orientación y retroalimentación visual para garantizar que los implantes y fresas se coloquen de acuerdo con el plan. Por lo tanto, la información que se ha planificado en el escaneo se transfiere a la situación clínica de la vida real y se puede rastrear la posición exacta de la pieza de mano (27,35).
La tecnología de ND ha demostrado ser útil para la ubicación de canales que de otra manera no podrían ser detectados y negociados con las técnicas tradicionales (37). Así mismo, el uso de ND podría aumentar los beneficios de las cavidades de acceso ultraconservador, llegando a la cámara pulpar y orificios del canal, sin sacrificar tejido dental innecesario y minimizando el potencial riesgo de debilitamiento iatrogénico o perforaciones (38). La ND ha demostrado significativamente menos desviaciones coronal y apical globales y deflexión angular que la técnica a mano alzada. En un estudio in vitro se demostró que la ND permitió una ubicación significativamente más precisa y predecible del canal MB2 en las réplicas del primer molar superior, en comparación a la mano alzada. La ND fue significativamente más precisa, mostrando diferencias más pequeñas en la angulación (4.8 ° ± 1.8) y en la distancia máxima desde la posición ideal (0.34 ± 0.19 mm). El procedimiento a mano alzada exhibió una angulación significativamente mayor (19.2° ± 8.6) y la distancia máxima desde la posición ideal (0.88 ± 0.41 mm) (38). Jain et al, en 2020, comparó ambas técnicas y demostró que el sistema de navegación dinámica generó una pérdida de tejido significativamente menor en comparación con el acceso a mano alzada. Asimismo, con esta tecnología la realización de los accesos tomó menos tiempo (37). En un estudio de Dianat en 2020, se observó que las desviaciones lineales y angulares medias, la reducción del grosor de la dentina (en ambos niveles), el tiempo de preparación de la cavidad de acceso y el número de contratiempos en el grupo de ND fueron significativamente menores que en el grupo de mano alzada. Confirmando que este sistema puede ayudar al clínico a evitar percances catastróficos durante la preparación del acceso en dientes calcificados (40).
Cuando fueron comparadas la técnica mano alzada, navegación dinámica y navegación estática, respecto a la desviación horizontal en el punto de entrada coronal, Zubizarreta y col. determinaron que hubo diferencias estadísticamente significativas entre la ND y MA y lo mismo entre NE y MA. No hubo diferencias entre ambos sistemas de navegación. Todas las cavidades de acceso endodóntico realizadas por el sistema de navegación asistido por computadora permitieron ubicar el sistema de canales radiculares (19). Resultados similares reportóTorres et al en 2021 (41).
Hasta el momento existen pocos estudios clínicos que den cuenta de los beneficios de este tipo de tecnología y que corroboren los excelentes resultados observados en los estudios in vitro. Sin embargo, los reportes publicados han informado de los buenos resultados en casos de canales parcialmente calcificados, retiro de postes y alteraciones anatómicas. Nahamias en 2019 publicó un caso de un paciente con un canal parcialmente calcificado y una corona de recubrimiento total. El acceso fue realizado con ND (Navident, Toronto, Canada) alcanzando con éxito la entrada al canal radicular(42). Dianat en 2021 reportó un caso de un paciente que dado su condición sistémica, la cirugía apical no estaba indicada por el peligro de osteorradionecrosis. Presentaba un molar superior cuyo canal disto vestibular se encontraba parcialmente calcificado y con una lesión apical. Se utilizó un sistema de navegación dinámica (X-guide, X-nav technologies, LLC, Lans- dale, PA, EE. UU.) que permitió la ubicación exitosa del canal. El tratamiento de endodoncia convencional se completó siguiendo una instrumentación, irrigación y obturación estandarizadas (43).
Otra condición cuyo tratamiento es de alta complejidad es la reintervención de canales con elementos de anclaje en su primer tercio. Se recomiendan numerosas técnicas y kits de instrumentos para la eliminación de postes de fibra, pero existe un alto riesgo de desgaste excesivo de la raíz debido a la similitud cromática de la dentina y estos elementos. Bardales-Alcocer en 2021 reportó un caso que muestra el uso de navegación dinámica para quitar un poste debajo de una corona de zirconio de un diente previamente tratado con periodontitis apical sintomática. El sistema de navegación dinámica permitió la eliminación mínimamente invasiva del poste con un alto grado de precisión, sin riesgo de desgaste dentario excesivo (44). De igual manera, Janabi en 2021, en un estudio in vitro corrobora la precisión yeficiencia del sistema dinámico de navegación en la eliminación de anclajes radiculares (45).
Actualmente, tres sistemas han centrado su atención en aplicaciones endodónticas, X-guide system (X-nav technologies, LLC, Lansdale, PA, USA) ImplaNav (BresMedical, Sydney, Australia) y Navident (ClaroNav, Toronto, Canada). Navident ha desarrollado mejoras en su software para un mejor uso en endodoncia.

Figura 3. Sistemas de navegación dinámica usados en Endodoncia.
Las ventajas del sistema de navegación dinámica se resumen en: (39)
- Alta precisión lo que evita el desgaste excesivo de tejido dentario durante el procedimiento de acceso endodóntico.
- Menor tiempo de ejecución. En casos de calcificación o reintervención de dientes con anclaje permite un abordaje rápido y seguro, que en condiciones normales demandaría más de una sesión clínica. En caso de tratamiento de urgencia es posible realizar la planificación y ejecución del tratamiento minutos más tarde de la obtención de las imágenes deTCHC.
- La inmediatez de este sistema de guía permite realizar ajustes en las rutas de perforación programadas durante el proceso, en el caso de dificultades clínicas imprevistas.
- No requiere fresas especiales. A diferencia de las fresas de guías estáticas que requieren mayor longitud que lo habitual, el procedimiento dinámico se realiza con fresas de acceso de uso normal, pudiendo ser utilizadas alta y baja velocidad que pueden ser calibradas al igual que los insertos ultrasónicos.
- Permite la refrigeración constante.
- El clínico ejecuta el procedimiento mirando un monitor, por lo que controla visualmente la progresión de la fresa dentro de la cavidad planificada, pudiendo realizar cambios en tiempo real.
- Se puede realizar la planificación de varias guías de fresado para un mismo tiempo.
- Es posible su uso en dientes posteriores gracias a que no necesita una plantilla.
La mayor limitante de los sistemas de navegación dinámica es el alto costo para la adquisición del aparato. Por otra parte, es necesario mencionar que requiere una curva de aprendizaje para adquirir destreza manual al realizar el tratamiento guiado, mientras se está observando el objetivo a través del computador en lugar de mirar hacia el paciente. Jorba-García en 2020 concluyó que los sistemas dinámicos de cirugía asistida por computadora son altamente precisas, independientemente de la experiencia del cirujano (46). Sin embargo, este sistema parece ofrecer más ventajas a los profesionales novatos, ya que les permite reducir significativamente sus desviaciones y conseguir resultados similares a los de los clínicos experimentados. Pirani en 2020 demostró las cualidades de la navegación dinámica en un estudio realizado en estudiantes y sugirió que puede ser muy útil para ayudar a aquéllos en la búsqueda de canales radiculares pues se considera un sistema de aprendizaje corto y fácil (47).
Actualmente, Navident (ClaroNav Inc, Toronto, ON, Canada) con su versión 3.0 de tercera generación es uno de los sistemas quirúrgicos de navegación computarizada de mayor aceptación en el mercado, introduciendo mayores cambios específicos en su software para aplicaciones en endodoncia. Este sistema comprende:
1. Una unidad móvil con una fuente de luz superior y dos cámaras estereoscópicas de seguimiento del movimiento de los sensores. Una computadora portátil montada en la unidad móvil con software de planificación. El soft- ware Navident que se ejecuta en el ordenador proporciona funcionalidades de planificación y navegación, estrechamente integradas.

Figura 4: Unidad Navident.
3. Un sensor llamado Jaw-Tag se fija en la mandíbula o head-tag para el maxilar. Este aditamento permitirá registrar continuamente la posición de éste durante el procedimiento con su aparición en el monitor de forma automática, rápida y con una precisión muy alta.
4. El Tracer toll permite trazar la superficie de los dientes mientras es rastreado por el sistema para ser vinculados con los datos del TCHC de los dientes previamente marcados en el software.
5. Un sensor óptico de posición del instrumento, Drill Tag, que detecta los patrones espaciales impresos y reporta constantemente sus posiciones relativas, a una pequeña fracción de milímetro al software Navident. Es una abrazadera de metal desmontable que abraza la pieza de mano universal y una pieza de plástico especialmente marcada.
6. Calibrador: permite el registro con precisión de todo instrumento que vaya a ser usado sobre los dientes, ya sea pieza de mano y fresas.
El Protocolo Navident (44)
1.- Selección del Caso.
2.- Exploración. Obtener TCHC preoperatoria. La primera etapa del flujo de trabajo TaP (Trace and Place) de Navident es la importación del conjunto de datos DICOM del paciente al software de planificación de navegación dinámica para revelar la dentición.
3.- Planificación. En la imagen tomográfica se planifica el punto de entrada, la orientación, angulación del eje y la profundidad de la cavidad de acceso. El punto de entrada comienza en el borde incisal / oclusal hasta el punto de negociación de los canales en 3 dimensiones.
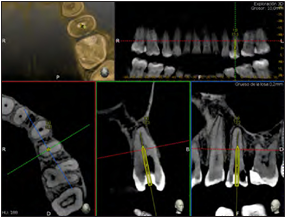
Figura 5: Vista del software Navident en el monitor.
Trazado. Se necesita hacer coincidir la planificación de la TCHC con la posición del paciente denominando a eso, “registro de seguimiento” que proporciona una posición precisa del diente y el canal en cualquier momento durante el procedimiento. Se eligen de 3 a 6 puntos de referencia (3 a 6 dientes) marcados virtualmente en el software. Se fija firmemente un sensor óptico o Jaw-Tag en la boca del paciente en el mismo maxilar donde se ubica el diente a tratar. Con una herramienta denominada “tracer tool” se realiza el registro de trazado, deslizando esta herramienta a lo largo de la superficie del diente. Esto crea una malla tridimensional de aproximadamente 100 puntos, quedando superpuesto sobre el CBCT y a partir de ese momento el software sabe sobre cuáles estructuras se esta trabajando.
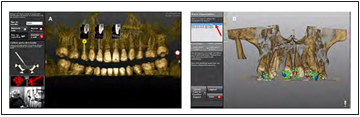
Figura 6-A. Registro de seguimiento: selección de puntos de referencia para el trazado.
Figura 6-B. Registro de seguimiento. Malla tridimensional de puntos que indican la posición espacial de los dientes seleccionados.
Calibración. La pieza de mano y la mandíbula se rastrean mediante las etiquetas de seguimiento óptico adjuntas (DrillTag y JawTag, respectivamente). La pieza de mano y las fresas se calibran en dos pasos: el eje y luego la calibración de las puntas de las fresas.
6.- Navegación. De acuerdo a lo planificado, se observa una representación precisa en tiempo real de la ubicación y la trayectoria de la punta de la fresa en relación con la anatomía de la ImagenTCHC del diente y la cavidad de acceso virtual planificada. Como se observa en la Figura 7-A la longitud del eje central del procedimiento planificado está representada por el centro del objetivo estático amarillo, la fresa es verde; el símbolo de profundidad se vuelve amarillo cuando la fresa y el eje central se superponen (Figura 7-B).
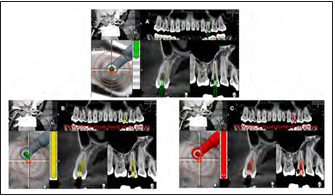
Figura 7-A. Inicio de la navegación.
Figura 7-B. Superposición de la fresa y el eje central, a 0,5 mm del objetivo.
Figura 7-C. Sensor de profundidad indica que se ha alcanzado el objetivo.
La dirección en tiempo real de la fresa se representa como un cono en la cabeza de la pieza de mano. El cono se volverá verde cuando la punta del instrumento esté dentro de 0,5 mm y tenga una angulación de menos de 3 grados al glide path planificado. Cuando la punta de la alcanza una distancia de 1 mm de la extensión apical u horizontal del punto de referencia de profundidad planificada, el indicador de profundidad se vuelve amarillo. Cambia a rojo en el sensor de profundidad cuando se alcanza la profundidad correcta.
Sin duda, será necesario un cambio de paradigma por parte de los endodoncistas para adoptar esta nueva y potente herramienta en el manejo de los casos más difíciles que tratamos. Esta revisión ha apuntado al tratamiento no quirúrgico en endodoncia, sin embargo, el uso de esta valiosa tecnología esta reportando igualmente notables resultados en la microcirugía endodóntica. Las ventajas de utilizar la guía dinámica en los tratamiento endodónticos, hasta ahora superan los costos de este nuevo método.
Conclusión
El advenimiento de la endodoncia guiada por computadora simplifica tratamientos complejos con gran precisión y por ende con mayor conservación de tejido dentario, de manera menos compleja y en menor tiempo de trabajo.
La navegación dinámica puede subsanar todas las desventajas de la navegación estática, sin embargo, ambas cumplen una función con resultados óptimos.
El sistema dinámico es verdaderamente útil y abre un gran abanico de posibilidades para la resolución de casos difíciles que hasta hace poco tenían un mal pronóstico. Es una oportunidad para aplazar el tiempo de vida útil de un diente.
La navegación dinámica es una técnica prometedora con un alto grado de previsibilidad y un bajo riesgo de daño iatrogénico. El tratamiento se puede realizar con mínima invasión y se puede reducir el tiempo en la consulta. Sin embargo, esto debe interpretarse con cautela porque se basa en evidencia limitada. Son esenciales los ensayos clínicos randomizados aleatorizados (ECCA) para obtener una evidencia concluyente que respalde el quehacer clínico y la utilización de este tipo de tecnologías.
Referencias Bibliográficas
1. Clark D, Khademi J. Modern molar endodontic access and directed dentin conserva- tion. Dent Clin NAm. 2010;(54):249-73.
2. Auswin K, Ramesh S. Truss access new conservative approach on access opening of a lower molar: a case report. Journal of advanced pharmacy education & research. 2017;(7):344-347.
3. McCabe P, Dummer P. Pulp canal obliteration: an endodontic diagnosis and treatment challenge. International Endodontic Journal. 2012;(45):177– 197.
4. Oginni AO, Adekoya-Sofowora CA. Pulpal sequelae after trauma to anterior teeth among adult Nigerian dental patients. BMC Oral Health. 2007 (31); 7:11.
5. Andreasen FM,Vestergaard Pedersen B. Prognosis of luxated permanent teeth – deve- lopment of pulp necrosis. Endodontics and DentalTraumatology 1985;1, 207–20.
6. Andreasen FM, ZhijieY,Thomsen BL, Anderson PK. Occurrence of pulp canal oblitera- tion after luxation injuries in the permanent dentition. Endodontics and Dental Trauma- tology 1987 (3): 103–15.
7. Fleig S,AttinT, Jungbluth H. Narrowing of the radicular pulp space in coronally restored teeth. Clin Oral Investig. 2016;(21):1251–7.
8. Cvek M, Granath L, Lundberg L (1982) Failures and healing in endodontically treated
non vital anterior teeth with post traumatically reduced pulpal lumen.ActaOdontologica Scandinavia 1982;(40): 223–8.
9. Hülsmann M. Dens invaginatus: aetiology, classification, prevalence, diagnosis, and treatment considerations. Int Endod J. 1997;(30): 79- 90.
10. AAE.Guidelines for Using theAAE EndodonticCase DifficultyAssessment Form Chi- cago:TheAmericanAssociation of Endodontists; 2020.
11. MalfazJ.Applicationsofthemicroscope in currentendodontics. RCOE.2002; 7(3):301-310.
12. Patel S, Kanagasingam S, Mannocci F.Cone BeamComputedTomography (CBCT) in Endodontics. Dental Radiography. 2010; 37(6): 373-9.
13. PlotinoG, PameijerCH,Grande NM,Somma F.Ultrasonics in endodontics: a review of the literature. J Endod. 2007 33(2):81-95.
14. Gutmann JL. Minimally invasive dentistry (Endodontics). J Conserv Dent. 2013 16(4):282-3.
15. Gluskin AH, Peters CI, Peters OA. Minimally invasive endodontics: challenging prevai- ling paradigms. Br Dent J. 2014 216(6):347-53
16. Moreno-RabiéC,TorresA, Lambrechts P, Jacobs R.Clinical applications, accuracy and limitations of guided endodontics: a systematic review. Int Endod J. 2020;53(2):214-231
17. Zubizarreta-Macho Á, Muñoz AP, Deglow ER, Agustín-Panadero R, Álvarez JM. Ac- curacy of Computer-Aided Dynamic Navigation Compared to Computer-Aided Static Procedure for EndodonticAccess Cavities:An inVitro Study. JClin Med. 2020: 2;9(1):129.
18. Jain SD, Saunders MW, Carrico CK, Jadhav A, Deeb JG, Myers GL. Dynamically Na- vigated versus Freehand Access Cavity Preparation: A Comparative Study on Substance Loss Using Simulated Calcified Canals. J Endod. 2020;46(11):1745-1751.
19. Zubizarreta-Macho Á,Valle Castaño S, Montiel-Company JM, Mena-Álvarez J. Effect of Computer-Aided Navigation Techniques on the Accuracy of Endodontic Access Cavi- ties:A Systematic Review and Meta-Analysis. Biology (Basel). 2021:10;10(3):212.
20. Zehnder MS, ConnertT, Weiger R, Krastl G, Kühl S. Guided endodontics: accuracy of a novel method for guided access cavity preparation and root canal location. Int Endod J. 2016;49(10):966-72
21. Block M, Emery R. Static or Dynamic Navigation for Implant Placement- Choosing the Method of Guidance. JOral Maxillofac Surg. 2016;74(2):269-77
22. Van der Meer WJ, Vissink A, NgYL, et al. 3D Computer aided treatment planning in endodontics. J Dent. 2016; 45:67–72.
23. Lara-Mendes STO, Barbosa CFM, Santa-Rosa CC, Machado VC. Guided Endodon- tic Access in Maxillary Molars Using Cone-beam Computed Tomography and Com- puter-aided Design/Computer-aided Manufacturing System: A Case Report. J Endod. 2018;44(5):875-879.
24. ConnertT, Krug R, Eggmann F, Emsermann I, ElAyouti A, Weiger R, Kühl S, Krastl G. Guided Endodontics versusConventionalAccessCavity Preparation:AComparative Stu- dy on Substance Loss Using 3-dimensional-printedTeeth. J Endod. 2019;45(3):327-331.
25. Krastl G, Zehnder MS, Connert T, Weiger R, Kühl S. Guided Endodontics: a novel treatment approach for teeth with pulp canal calcification and apical pathology. Dent Traumatol. 2016;32(3):240-246.
26. ConnertT, Zehnder M, Amato M, Weiger R, Kuhl S, Krastl G. Microguided Endodon- tics: a method to achieve minimally invasive access cavity preparation and root canal location in mandibular incisors using a novel computer-guided technique. Int Endod J. 2018; 51:247–255.
27. KinariwalaN&SamaranayakeL.Guided Endodontics.2020.Capitulo 9, paginas 193-202.
28. Buchgreitz J, Buchgreitz M, Mortensen D, Bjorndal L. Guided access cavity prepa- ration using cone-beam computed tomography and optical surface scans – an ex vivo study. Int Endod J. 2015;1-6.
29. Tavares W, Machado V, Oliveira F, Canal B, Cruz L, Diniz A, et al. Guided Endodontics in Complex Scenarios of Calcified Molars. Case Report. Iran Endod J. 2020; 15(1):50-56.
30. Brief J, Edinger D, Hassfeld S, Eggers G. Accuracy of image-guided implantology. ClinOral Implants Res. 2005;16(4):495-501.
31. Emery RW, Merritt SA, Lank K, Gibbs JD. Accuracy of dynamic navigation for dental implant placement–model-based evaluation. 2016. JOral Implantol; 42(5):399-405.
32. Block MS, Emery RW. Static or Dynamic Navigation for Implant Placement - Choo- sing the Method of Guidance. JOral Maxillofac Surg. 2016;74:269-77.
33. Block MS, Emery RW, Cullum DR, et al. Implant Placement Is More Accurate Using Dynamic Navigation. JOral Maxillofac Surg. 2017;75:1377-86
34. Chen CK,Yuh DY, Huang RY, Fu E,Tsai CF, Chiang CY.Accuracy of Implant Placement with a Navigation System, a Laboratory Guide, and Freehand Drilling. Int J Oral Maxillo- fac Implants. 2018;33(6):1213-1218.
35. Stefanelli L. Accuracy of Dynamic Navigation System Workflow for Implant Suppor- ted FullArch Prosthesis:A case series. Int. J. Environ. Res. Public Health. 2020; 17:2-15.
36. Chong. Computer-aided dynamic navigation: a novel method for guided endodon- tics. Int Endod J. 2019; 50:196-202.
37. Jain S, Saunders M, Carrico C, Jadhav A, Golob Deeb J, Myers G. 3-Dimensional Accuracy of Dynamic Navigation Technology in Locating Calcified Canals. J Endod. 2020;46(6):839-845
38. Gambarini G. Digital Design of Minimally Invasive Endodontic Access Cavity. ppl. Sci. 2020, 10, 3513
39. Gambarini G, Galli M, Morese A, Stefanelli LV, Abduljabbar F, Giovarruscio M, et al. Precision of dynamic navigation to perform endodontic ultraconservative access. Cavi- ties: a preliminary in vitro análisis. J Endod. 2020;46(9):1286-1290.
40. Dianat O, Nosrat A, Tordik PA, Aldahmash SA, Romberg E, Price JB, Mostoufi B. Ac- curacy and Efficiency of a Dynamic Navigation System for Locating Calcified Canals. J Endod. 2020;46(11):1719-1725.
41. Torres B, BoelencG, Pedanob L,Jacobsa R. Dynamic navigation: alaboratory study on the accuracyand potentialuse ofguided root canaltreatment Belgium:OMFS-IMPATH;2021.
42. Nahamias Y. Dynamic Endodontic Navigation: A Case Report. Oral health group. 2019. https://www.oralhealthgroup.com/features/dynamic-endodontic-navigation-a- case-report/. Ultima revisión 20/03/22.
43. DianatO,Gupta S, Price JB, Mostoufi B. Guided EndodonticAccess in a Maxillary Mo- lar Using a Dynamic Navigation System. J Endod. 2021;47(4):658-662.
44. Bardales-Alcocer J, Ramírez-Salomón M, Vega-Lizama E, López-Villanueva M, Alva- rado-Cárdenas G, Serota KS, Ramírez-Wong J. Endodontic Retreatment Using Dynamic Navigation:ACase Report. J Endod. 2021;47(6):1007-1013.
45. Janabi A, Tordik P, Griffin I, Mostoufi B, Price J. Accuracy and Efficiency of 3dimen- sional Dynamic Navigation System for Removal of Fiber Post from Root Canal–Treated Teeth. J Endod. 2021;(47):1453-1460.
46. Jorba-García A, Figueiredo R, González-Barnadas A, Camps-Font O, Valmaseda- Castellón E. Accuracy and the role of experience in dynamic computer guided dental implant surgery:An in-vitro study. 2019. Oral Patol Oral Cir Bucal; 1;24: 76-83.
47. Pirani C. Use of dynamic navigation for a minimal invasive finding of root canals: a te- chnical note.Giornale Italiano di Endodonzia. 2020; 34:82-89.




